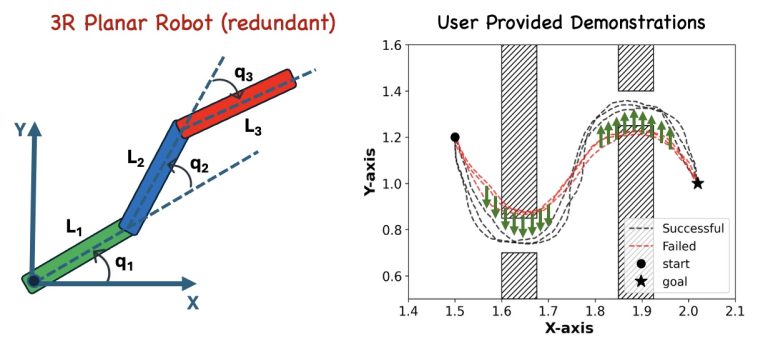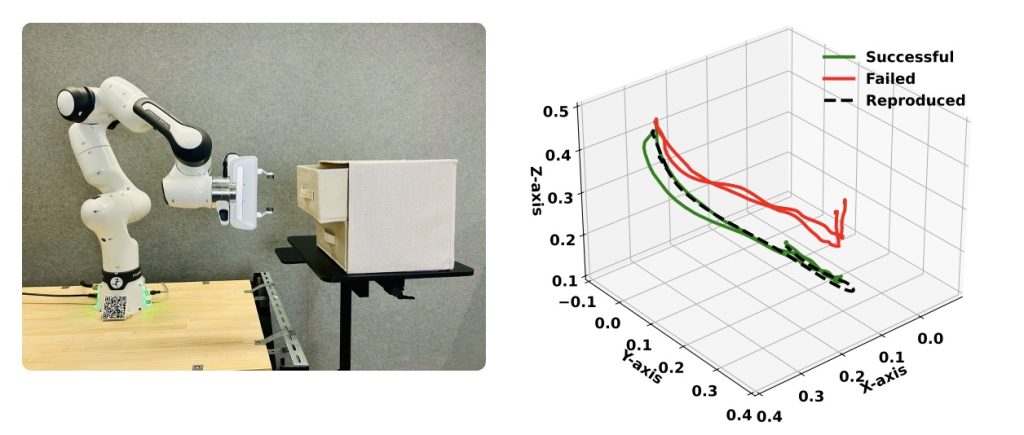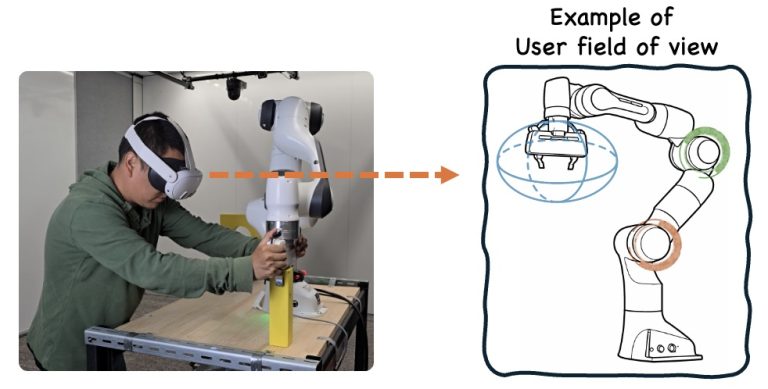
Robots have the potential to assist humans not only in industrial tasks but also in everyday life tasks. However, programming robots typically require advanced technical expertise, which limits access for novice users. Learning from demonstration addresses this challenge by allowing novice users to teach robots new skills through physical demonstrations rather than writing sophisticated code, thereby promoting the democratization of robotics. Prior research has shown that novice users often provide suboptimal demonstrations, which can reduce the robot ability to learn and execute the desired task effectively. To address this issue, we aim to design an augmented-reality based real-time feedback system that supports users during demonstrations, enabling an effective communication between the human demonstrator (teacher) and the robotic system (learner).
System Design and Evaluation
Initially, it is important to identify potential ways to visualise the desired information content, aiming to reduce cognitive load while maximising teaching efficiency during demonstrations. Based on insights from focus group study (N=9), we designed the feedback system using Unity Engine and then we conducted a between-subject user study (N=36) to evaluate the system.
We found that proposed real-time feedback system improves multiple aspects of human performance, including mental workload, demonstration completion time, and task completion rate, compared to the conventional offline feedback system that only shows what the robot has learned after several demonstrations rather than assisting users during the demonstrations process itself.
This paper has been submitted to the ACM Designing Interactive Systems (DIS) 2026 conference and is currently under review.