Learning from Demonstration is a common approach that enables novice users to teach robots new skills through demonstrations rather than writing complex code. However, novice users often provide suboptimal demonstrations or even failed attempts, which can reduce the robot ability to effectively learn and execute tasks. Prior research has explored learning from such demonstrations with a focus solely on achieving robot task completion (i.e., binary notion of robot success or failure using learned model); however, these approaches often overlook the quality of task execution (i.e., how well the robot performs the task).
Method and Evaluation
In this work, we present a novel quality-aware LfD framework that leverages a revised weighted Gaussian Mixture Model (GMM) to learn from both failed and suboptimal demonstrations. The proposed algorithm adjusts the GMM components by repelling its away from failed demonstrations and attracting them toward successful demonstrations.
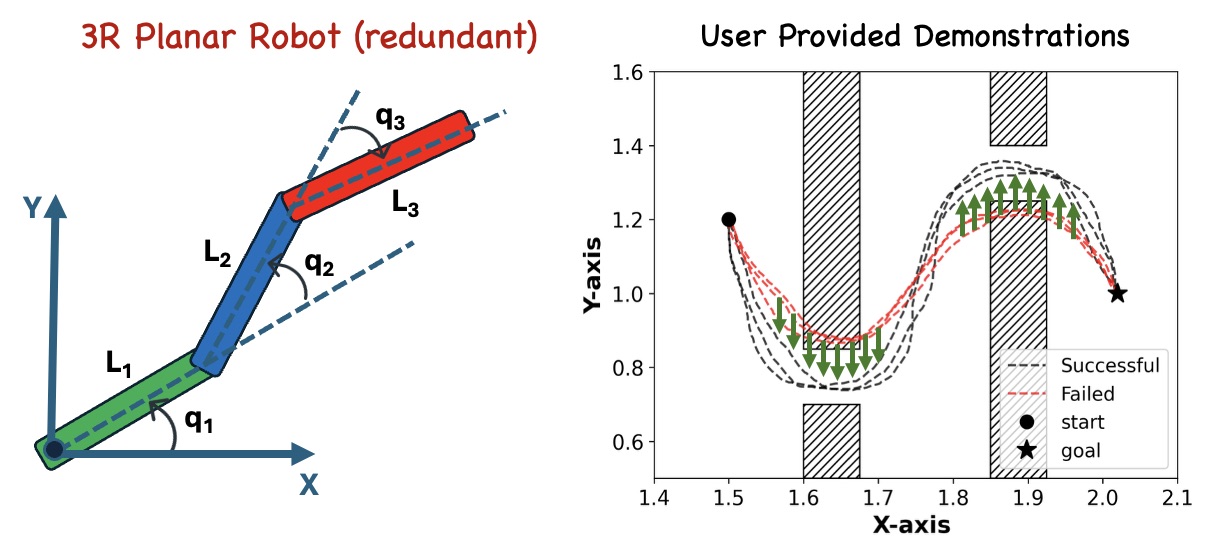
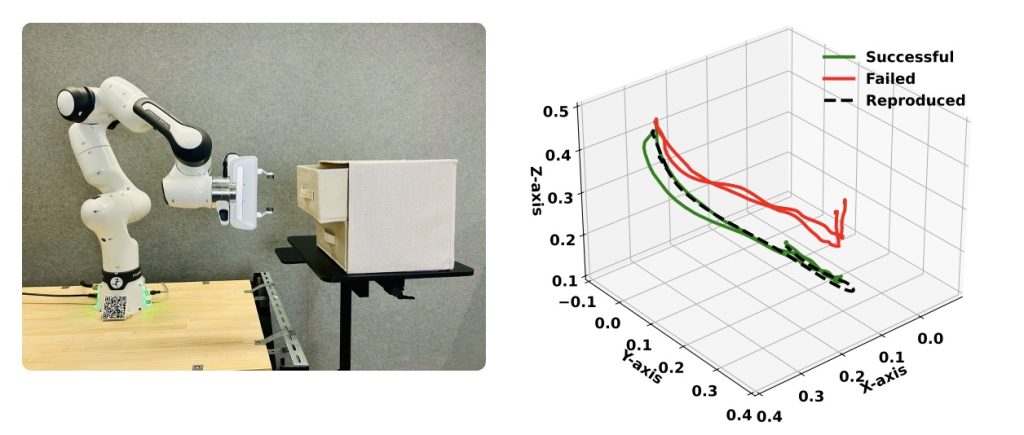
The proposed framework not only ensures task completion but also guides the system toward high-quality task execution. We validated our approach through extensive 2D simulations with a 3R planar redundant robot and then 3D real-world experiments using a Franka 7-DoF Panda robot.
This paper is in preparation for submission to IEEE RAL.