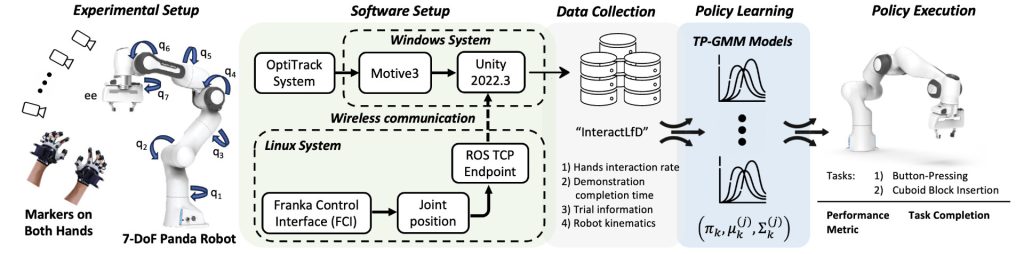
Abstract: Learning from Demonstration allows robots to acquire skills from human demonstrations, making them more accessible to a wider range of users. Among different approaches, kinesthetic teaching allows humans to manipulate the robot joints directly, making it effective method for demonstrating constrained tasks. However, robots with kinematic redundancy enable multiple joint configurations to achieve a desired task, which could influence human teaching performance. One one hand, it could make it easier, allowing more freedom to demonstrate the task, but on the other, it also increases the number of joints that needs to be manipulated, potentially affecting cognitive and physical load of the demonstrator. Therefore, it is crucial to investigate how the number of degrees of redundancy (DoR) impact human performance during kinesthetic demonstrations, and then how these demonstrations influence robot performance. We simulated high and low DoR by locking one of the robot joint on a 7-DoF Panda robotic arm. We conducted a within-subject user study (N = 24) with two conditions: unconstrained condition (high DoR) and constrained condition (low DoR). We used a motion capture system to capture participants physical interaction with the robot when demonstrating two tasks: button pressing and cuboid block insertion. The results show that the robot’s DoR significantly affects mental workload, demonstration time, number of failed attempts, and physical interaction with the robot. Likewise, joint constraints significantly influence robot performance, measured by task completion using the learned model. These findings highlight the importance of considering robot DoR during demonstrating constrained tasks, allowing novice users to provide effective demonstrations.
Study Overview
User Experiment Videos
Button Pressing Task
Cuboid Block Insertion Task
Key Takeaways
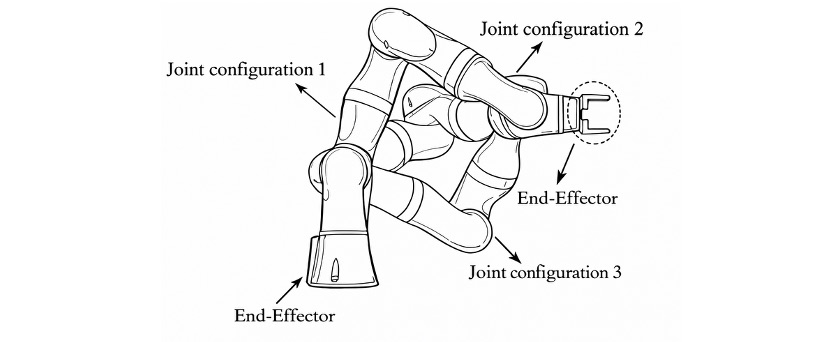
Providing novice users with higher robot redundancy (more DoF than strictly required) helps them identify suitable joint configurations within a larger feasible solution space.
The sequence of hand contact points contains valuable information that can be used to anticipate and prevent potential failures.
Citation
Muhammad Bilal, D. Antony Chacon, Nir Lipovetzky, Denny Oetomo, Wafa Johal, “Investigating the Impact of Robot Degree of Redundancy on Learning from Demonstration,” In 2026 21st ACM/IEEE International Conference on Human-Robot Interaction (HRI), 2026, doi: 10.1145/3757279.3785606.
[In Press]